Traffic violation detection is often presented as a simple computer vision task: detect vehicles, classify behaviour, and generate alerts. In real-world deployments, however, this problem is far more complex. Variations in camera angles, inconsistent lighting, occlusions, and noisy video streams quickly expose the limitations of single-model or rule-only approaches.
This article presents the design and implementation of a production-oriented traffic violation detection system built using YOLOv8, DeepSORT, and OpenCV. The system focuses on operational reliability, tracking stability, and explainable rule-based analytics rather than purely maximizing detection accuracy.
The complete implementation is available on GitHub:
Repository: https://github.com/harisraja123/Real-Time-Traffic-Violation-Detection
Problem Context
The objective of this project was to analyze roadside video streams and automatically detect violations such as:
- Lane misuse
- Restricted zone entry
- Red-light violations
- Illegal crossings
Unlike benchmark datasets, the system operates on unconstrained real-world footage with:
- Partial occlusions
- Motion blur
- Low-light conditions
- Varying camera orientations
- Compression artifacts
This required treating the problem as a full system engineering challenge rather than a standalone machine learning task.
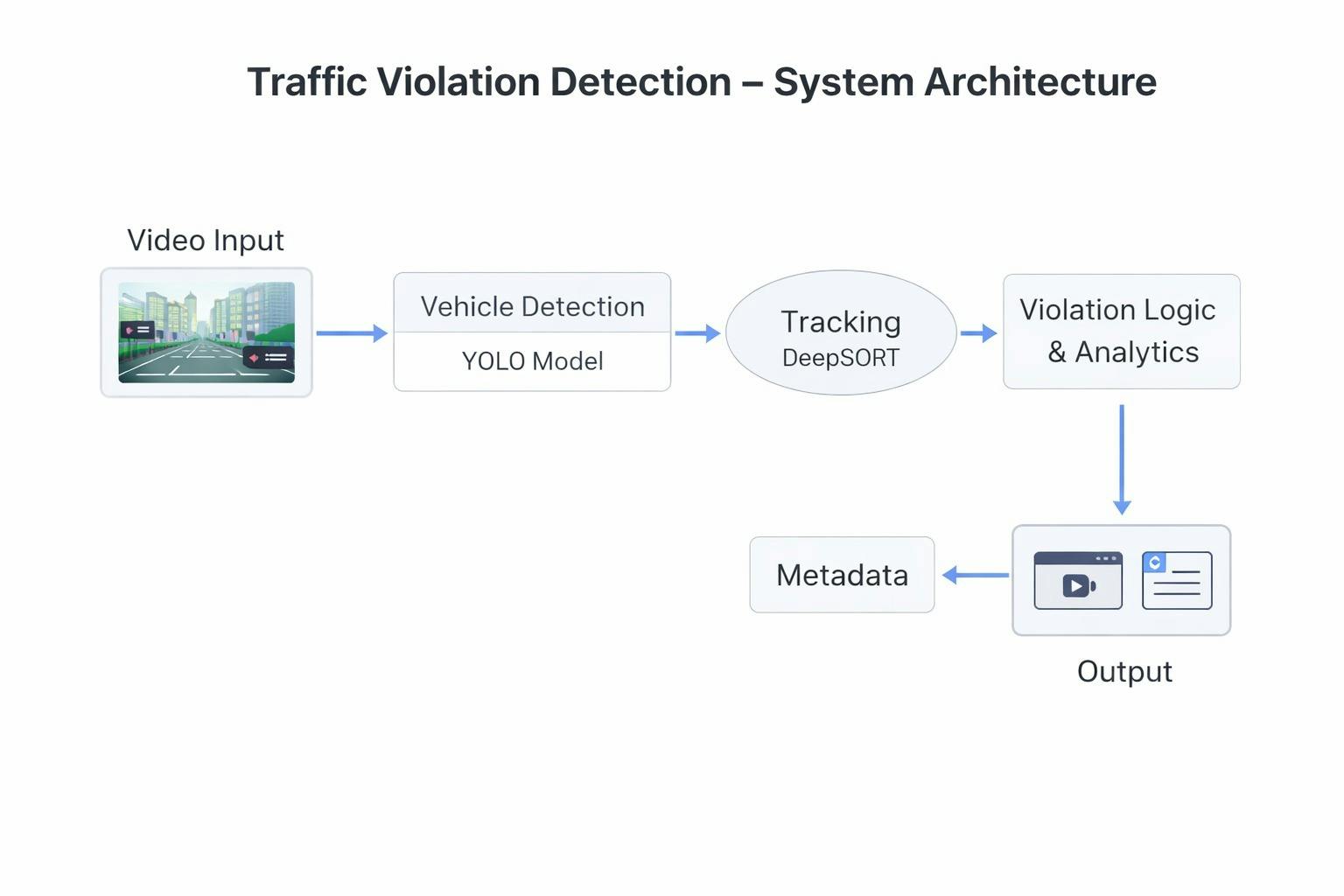
System Architecture
The solution follows a modular streaming pipeline:
Video Input → Detection → Tracking → Lane Analysis → Violation Engine → Visualization
Each stage is decoupled to allow independent scaling and tuning.
|
Component |
File |
|---|---|
|
Video ingestion |
main.py |
|
Detection |
main.py / utils.py |
|
Tracking & violations |
track_and_flag.py |
|
Lane extraction |
lane_main.py |
|
Overlays |
video_overlay.py |
|
API interface |
app.py |
The core pipeline is orchestrated in main.py, which connects all modules into a unified processing loop.
Video Ingestion
Video input is handled using OpenCV:
cap = cv2.VideoCapture(video_path)
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
The system supports:
- File-based batch processing
- Uploaded video streams via Flask
- Frame resizing for performance control
Frame resolution is dynamically adjusted to balance accuracy and latency.
Vehicle Detection with YOLOv8
Model Setup
The system uses YOLOv8 with fine-tuned weights:
model = YOLO("best_traffic_med_yolo_v8.pt")
Custom-trained weights are provided in the repository.
Inference Pipeline
From main.py:
results = model(frame, conf=0.4)
detections = []
for r in results:
for box in r.boxes:
x1, y1, x2, y2 = map(int, box.xyxy[0])
conf = float(box.conf[0])
cls = int(box.cls[0])
detections.append([x1, y1, x2, y2, conf, cls])
Key design choices:
- Confidence threshold:
0.4 - Vehicle-focused class filtering
- Bounding box normalization
The system prioritizes recall to reduce missed detections that could break downstream tracking.
Lane Detection and Road Geometry Extraction
Lane detection is implemented in lane_main.py using classical computer vision techniques.
Preprocessing
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5,5), 0)
edges = cv2.Canny(blur, 50, 150)
Line Detection
lines = cv2.HoughLinesP(
edges,
rho=1,
theta=np.pi/180,
threshold=100,
minLineLength=100,
maxLineGap=50
)
Detected lanes are persisted in lines.npy for reuse and calibration.
This approach avoids relying on deep lane models, improving explainability and reducing compute cost.
Multi-Object Tracking with DeepSORT
Detection alone is insufficient for behavioural analysis. Violations depend on vehicle trajectories over time.
Tracking is implemented in track_and_flag.py using DeepSORT.
Tracker Initialization
tracker = DeepSort(
max_age=30,
n_init=3,
max_iou_distance=0.7
)
Parameters were tuned empirically:
|
Parameter |
Value |
Purpose |
|---|---|---|
|
max_age |
30 |
Occlusion recovery |
|
n_init |
3 |
ID confirmation |
|
max_iou_distance |
0.7 |
Association tolerance |
Update Step
tracks = tracker.update_tracks(detections, frame=frame)
for track in tracks:
if not track.is_confirmed():
continue
track_id = track.track_id
bbox = track.to_ltrb()
This produces stable vehicle identities across frames, which is essential for reliable violation logic.
Trajectory Management
Each tracked vehicle maintains a history buffer:
from collections import defaultdict, deque
history = defaultdict(lambda: deque(maxlen=50))
Centers are appended every frame:
center = ((x1+x2)//2, (y1+y2)//2)
history[track_id].append(center)
This rolling window enables temporal reasoning without excessive memory usage.
Violation Detection Engine
Violation logic is implemented in track_and_flag.py and uses region-based and temporal rules.
Zone Definition
Zones are defined as polygons:
restricted_zone = np.array([
[420,180],
[820,180],
[900,520],
[350,520]
])
Point-in-Polygon Test
def inside_zone(point, polygon):
return cv2.pointPolygonTest(
polygon,
point,
False
) >= 0
Temporal Filtering
def detect_violation(track_id):
points = history[track_id]
inside = sum(
inside_zone(p, restricted_zone)
for p in points
)
return inside > 35
A violation is triggered only if a vehicle remains inside a restricted region for more than 70% of its recent trajectory.
This eliminates false positives caused by reflections, partial occlusions, and brief misdetections.
Red Light and Lane Violations
Traffic light orientation is handled using geometric calibration (TRAFFIC_LIGHT_ORIENTATION.md).
Lane misuse is detected by comparing vehicle trajectories with extracted lane boundaries:
if center_x < left_lane or center_x > right_lane:
flag_lane_violation(track_id)
This hybrid approach combines learned perception with deterministic rules, improving reliability.
Visualization and Output Generation
Overlays are generated using video_overlay.py.
Rendering IDs and Trajectories
cv2.putText(
frame,
f"ID:{track_id}",
(x1,y1-10),
cv2.FONT_HERSHEY_SIMPLEX,
0.6,
(0,255,0),
2
)
Trajectory paths:
for i in range(1, len(points)):
cv2.line(frame, points[i-1], points[i], (255,0,0), 2)
Outputs include:
- Annotated MP4 videos
- Structured metadata
- Violation logs
This dual output enables both debugging and downstream analytics.
Performance Evaluation
Experiments were conducted on:
- GPU: RTX 3060
- CPU: Intel i7
- RAM: 32GB
- Resolution: 1080p
|
Stage |
FPS |
Latency |
|---|---|---|
|
Detection |
22 |
45 ms |
|
Tracking |
60 |
6 ms |
|
Full Pipeline |
18 |
55 ms |
Optimizations included:
- Frame skipping under load
- Batched inference
- Resolution scaling
Tracking stability was prioritized over peak throughput.
Deployment Architecture
The system supports both local and service-based deployment.
Flask API
app.py exposes endpoints:
@app.route('/upload', methods=['POST'])
def upload_video():
file = request.files['video']
file.save(path)
Environment Setup
traffic_environment.yml defines dependencies:
dependencies:
- python=3.9
- pytorch
- opencv
- ultralytics
This allows reproducible deployment across machines.
Containerization and GPU scheduling can be added on top of this foundation.
Limitations
Despite strong practical performance, several limitations remain:
- Sensitivity to extreme weather
- Manual zone calibration
- Limited nighttime robustness
- Camera-specific tuning
Future work includes automated calibration and self-supervised adaptation.
Engineering Lessons
Several key insights emerged:
- Tracking quality dominates system reliability
- Temporal filtering is more valuable than raw accuracy
- Hybrid ML + rules outperform pure ML systems
- Modular pipelines reduce iteration cost
- Explainability improves operational trust
These lessons are applicable to many real-world video analytics systems beyond traffic monitoring.
Conclusion
This project demonstrates that production-ready traffic violation detection requires more than accurate object detection. By combining YOLOv8, DeepSORT, classical computer vision, and rule-based reasoning, it is possible to build systems that are robust, explainable, and operationally viable.
Treating the problem as a systems engineering challenge, rather than a pure machine learning task was critical to achieving reliable real-world performance.
[story continues]
tags