
In early 2026, a Tesla Model 3 traveled from the Tesla Diner in Los Angeles to Myrtle Beach, South Carolina - a distance of 2,732.4 miles. The driver,
Yet, in the dense, fog-laden streets of San Francisco, a different kind of revolution is occurring. There, white Jaguar I-PACEs bearing the spinning crown of Waymo’s sensor suite are navigating complex urban environments with no one in the driver’s seat at all. These machines operate on a fundamentally different principle. They are not just reacting; they are planning. They rely on deliberate, reasoned, and verified method - backed by a sensor suite that sees the world not just as pixels, but as a precise geometric grid of laser-measured truth.
On one side stands Tesla, the maverick insurgent, betting the house on a vision-only approach that mimics human biology: eyes (cameras) and a brain (neural networks). On the other is Waymo, the methodical titan born from Google, deploying a fleet of robotaxis laden with a sophisticated, expensive array of lasers and radars, slowly but surely conquering city after city. And rising in the background is Nvidia, the arms dealer of the AI revolution, whose new Alpamayo solution promises to democratize the "reasoning" capabilities that might just level the playing field for everyone else.3
This report is an exhaustive teardown of this technological race for the Gran Turismo of Autonomous Driving. We will crack open the neural networks, analyze the sensor physics, scrutinize the silicon architecture, and parse the insights of AI pioneers like Andrej Karpathy. We will look past the marketing hype to the raw engineering challenges that remain. From the "March of Nines" to the debate between "fast" intuition and "slow" reasoning, this is the definitive deep dive into the autonomous driving technology of tomorrow.
Part I: The Architecture of Thought
System 1 vs. System 2: The Cognitive Engine
To understand why your car might one day drive better than you, we must first understand how you drive. Nobel laureate Daniel Kahneman described human cognition in two modes: System 1 and System 2.
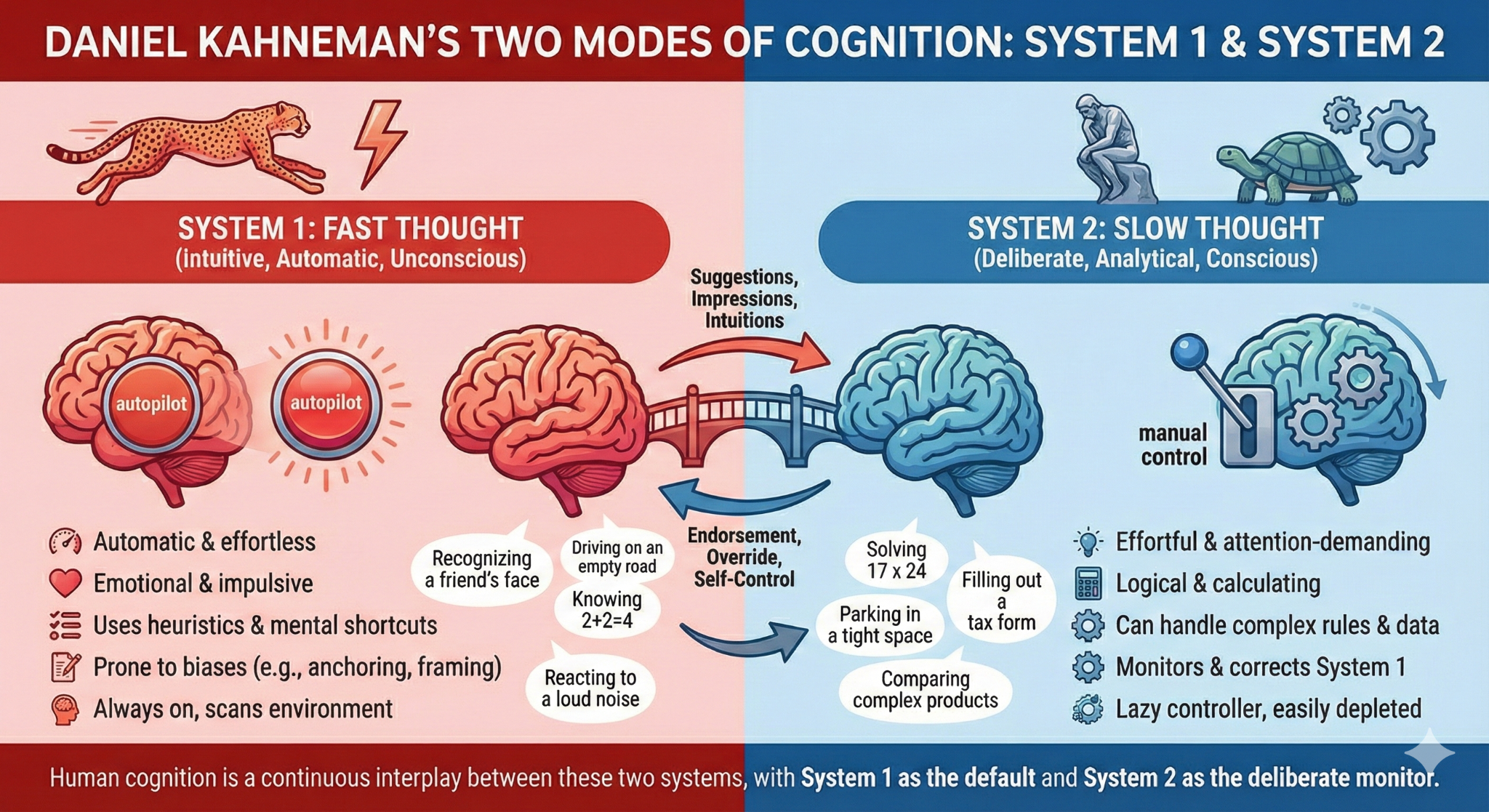
System 1 is fast, automatic, and intuitive. It is the part of your brain that catches a falling cup before you consciously realize it has slipped, or the part that steers your car down a familiar highway while your mind wanders to what you’ll make for dinner. It is effortless pattern matching.
System 2 is slow, deliberate, and logical. It is the part of your brain that engages when you try to solve a complex math problem, or—crucially—when you encounter a confusing construction zone with conflicting hand signals from a worker and a police officer. It requires active reasoning, simulation of future outcomes, and conscious choice.
For the last decade, the autonomous vehicle (AV) industry has largely been building System 1 machines. They process sensor data and output control commands in milliseconds based on learned patterns. But the recent breakthroughs in Generative AI and Large Language Models (LLMs) have introduced the possibility of System 2 thinking for cars—the ability to "reason" through edge cases rather than just reacting to them.3
Tesla’s End-to-End Neural Network: The Intuitive Savant
Tesla’s FSD v14 represents the pinnacle of the "System 1" approach, pushed to its absolute limit through what is known as "End-to-End" (E2E) learning. In traditional robotics, driving was broken down into modular tasks: perception (what do I see?), localization (where am I?), planning (where should I go?), and control (how do I turn the wheel?). Humans wrote C++ code for each step. "If red light, then stop."
Tesla has scrapped that. FSD v12 and its successor v14 removed over 300,000 lines of heuristic C++ code, replacing the "rule-based" logic with massive neural networks trained on millions of video clips.5 The cameras feed raw video into the model, and the model outputs steering and pedal commands directly. It is a "black box" of intuition. It learns to drive not by being told the rules of the road, but by watching humans drive billions of miles.
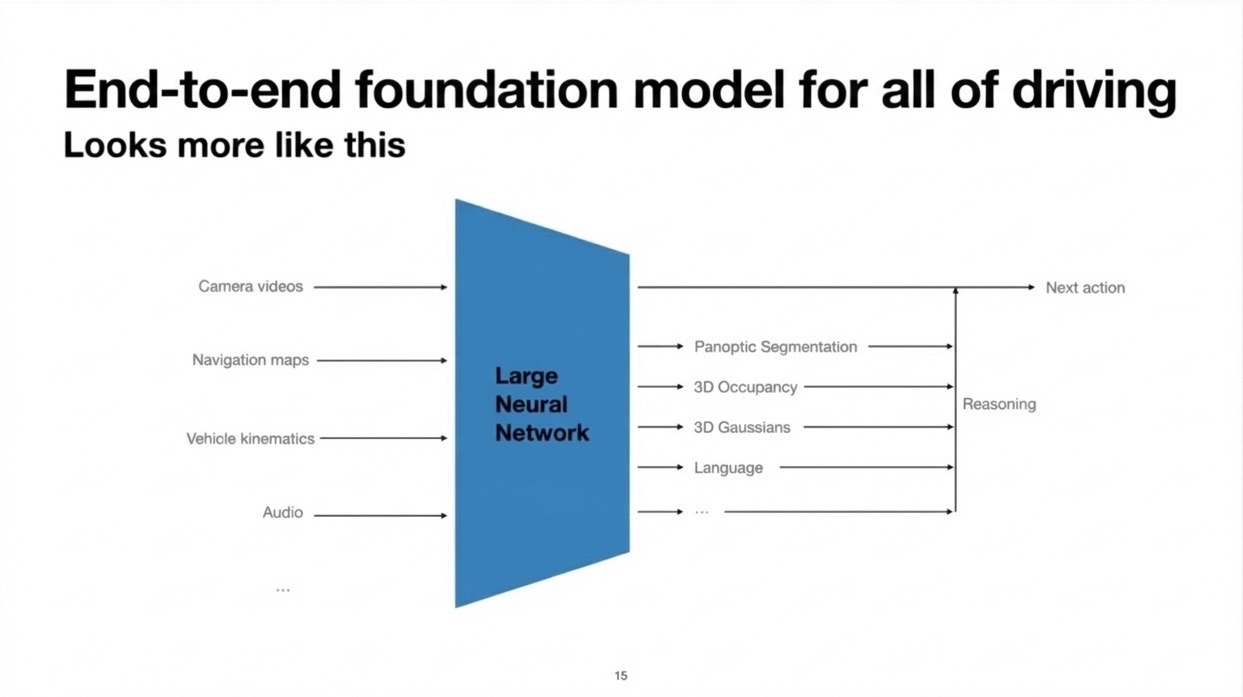
The technical architecture of FSD v14 is built upon a foundation of massive data ingestion and neural rendering. It utilizes "Occupancy Networks" which take 2D video feeds from eight cameras and reconstruct a 3D volumetric representation of the world in real-time.7 This is not a simple object detection list; it is a spatial understanding of "drivable space" versus "obstacle."
The brilliance of this approach is its scalability. Because it learns from raw video, it does not require high-definition (HD) maps. It does not need to know the exact GPS coordinate of a lane line to know that it shouldn't cross it. It simply looks at the road and "intuits" the path, just as a human driver does on an unfamiliar country road. This allows Tesla to deploy FSD anywhere, from the chaotic streets of Mumbai to the snowy passes of Norway, without a pre-mapping team.8
However, the "System 1" nature of end-to-end learning is also its Achilles' heel. It is probabilistic, not deterministic. It mimics human behaviors—including, occasionally, human errors. And because it lacks a symbolic "reasoning" layer, it can struggle to explain why it made a decision, making debugging and safety validation a nightmare of statistical probabilities rather than verifiable logic.9 It is a system of correlation, not necessarily causation.
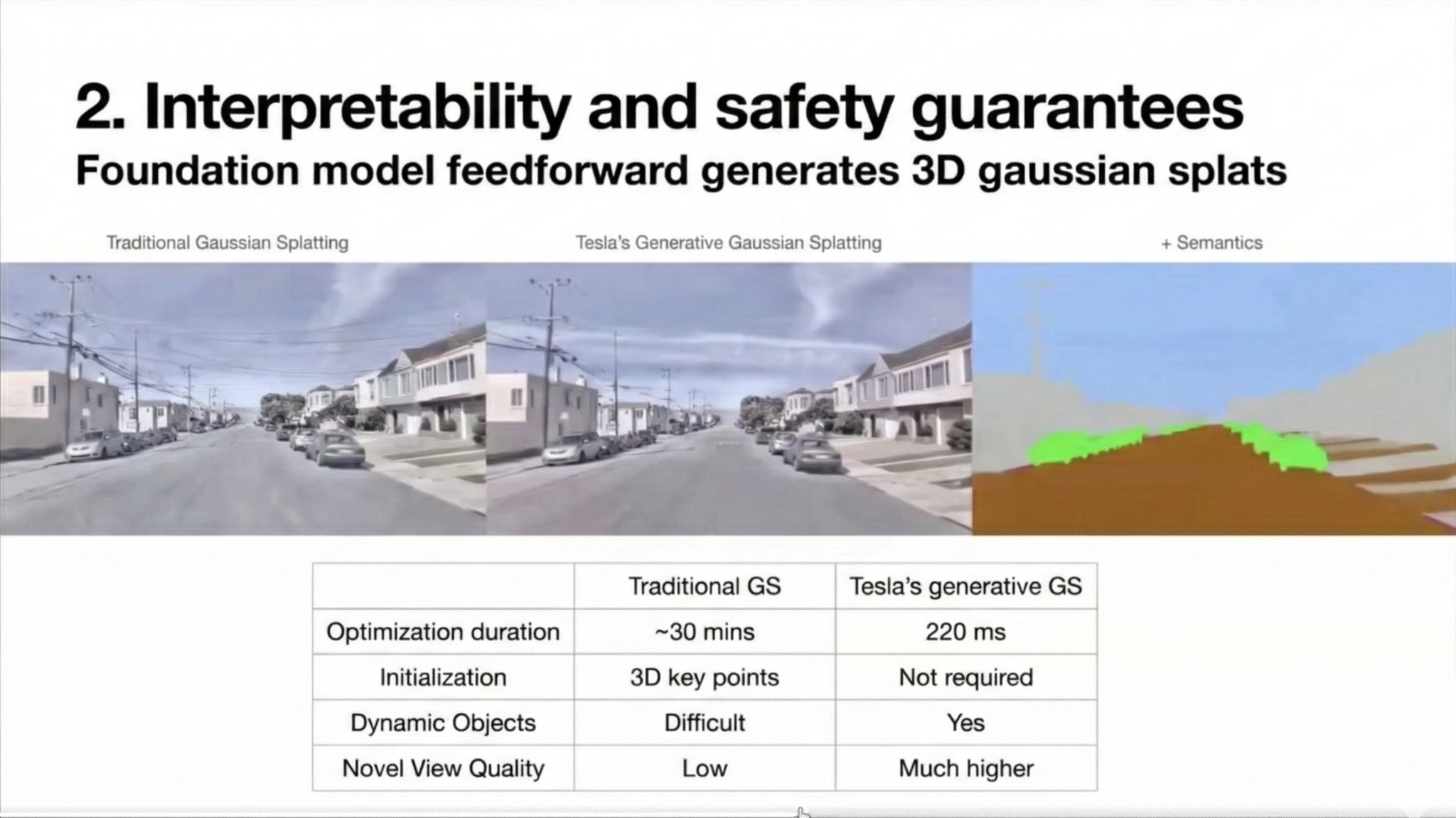
Ashok Elluswamy, Tesla's VP of Autopilot Software, delivered "Building Foundational Models for Robotics at Tesla," at the International Conference on Computer Vision (ICCV) in October 2025. This tech talk, gave us a glimpse of Tesla FSD’s “System 2” enhancements to aid in interpretability and safety through "chain-of-thought and process verification," the foundation model predicts many interpretable outputs. These include:
- 3D occupancy and flow
- Objects such as vehicles, pedestrians, bicyclists, etc.
- Traffic controls
- Road boundaries, lanes and semantics
- Speed limits and other road attributes
- Decisions expressed as plain language
Waymo’s Hybrid Architecture: The Deliberative Professor
Waymo has taken a fundamentally different architectural path. While they use deep learning heavily for perception and prediction, their planning and control layers have historically been more structured, relying on a modular pipeline that allows for strict safety guarantees. They don't just guess what to do; they calculate it.5
However, Waymo is not ignoring the AI revolution. In their latest 6th Generation Driver, they have integrated a "System 2" component explicitly. They utilize a Vision-Language-Action (VLA) model—a type of multimodal AI that can process visual data and "reason" about it using language capabilities.
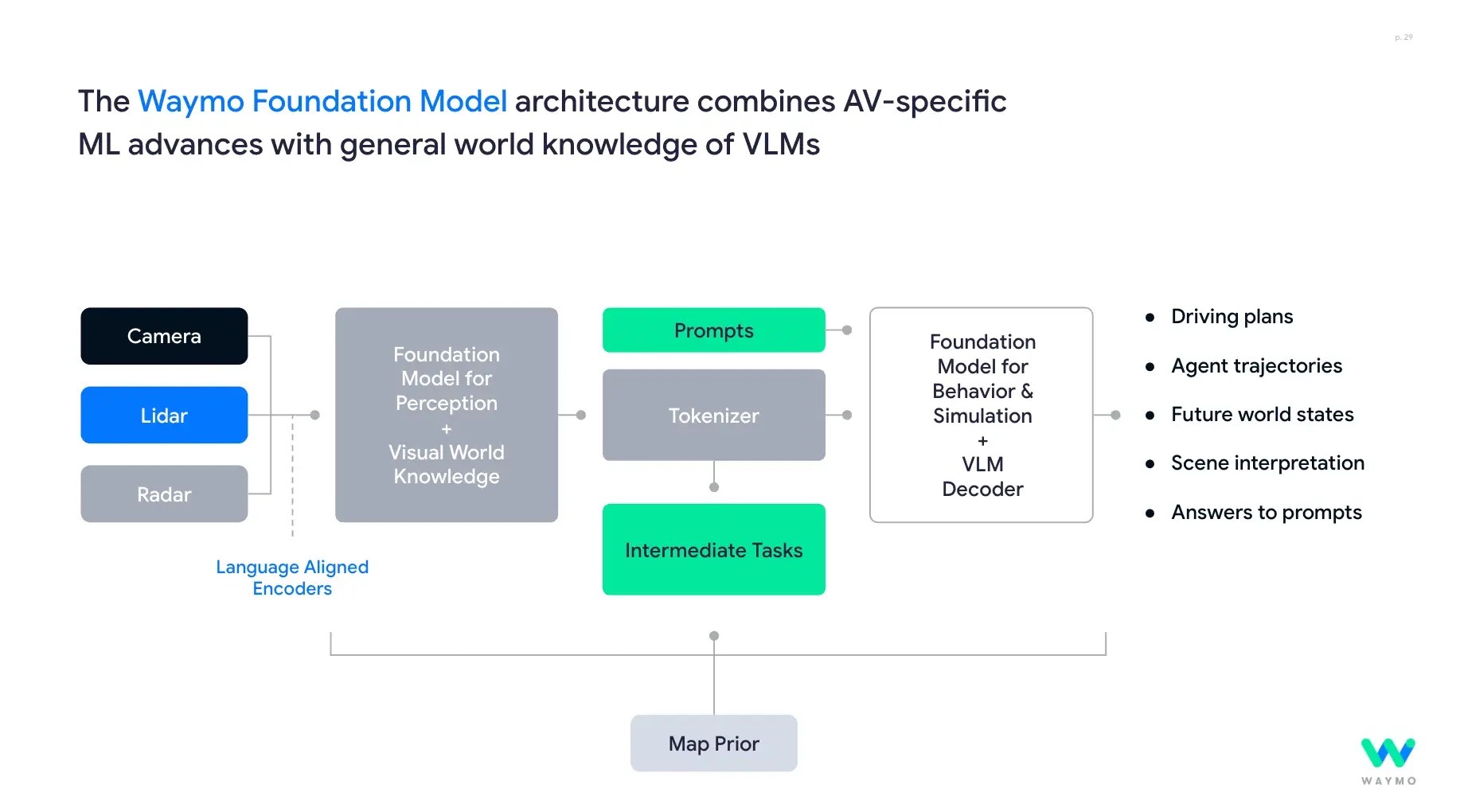
Waymo’s architecture splits the difference:
- Fast System (System 1): A sensor fusion encoder that reacts in milliseconds to cars cutting in or pedestrians stepping off curbs. This handles the 99% of driving that is routine. This layer fuses camera, LiDAR, and radar inputs into a coherent world state vector.10
- Slow System (System 2): A Driving VLM (Visual Language Model) trained on Gemini capabilities. This system engages for complex, semantic reasoning. For example, if a Waymo vehicle encounters a burning car on the road, the "fast" system might just see an obstacle. The "slow" VLM understands "fire," "danger," and "emergency personnel," and can reason that it should not just stop, but perhaps execute a U-turn or follow a police officer's non-standard hand signals.10
This "Think Fast, Think Slow" architecture allows Waymo to have the reliability of a robot with the adaptability of a reasoning human. It is verifiable—engineers can audit the "reasoning trace" of the VLM to see why it decided to ignore a green light (perhaps because a police officer was waving it to stop).11 This "explainability" is a critical requirement for regulators and safety auditors who are uncomfortable with the "black box" nature of pure end-to-end networks.
In contrast to Tesla's scalable approach, Waymo's reliance on centralized, high-fidelity mapping and connectivity proved to be a vulnerability during a major power outage in San Francisco in late 2025. When large sections of the city lost power, several Waymo vehicles abruptly stalled, blocking intersections and creating localized gridlock. The incident highlighted the fragility of a system dependent on constant communication and pre-validated operational domains. While the vehicles were eventually recovered without incident, the event served as a stark reminder that even the most deliberative "System 2" architecture is susceptible to failures in the underlying physical infrastructure, a challenge less acute for Tesla's vision-only models that can operate purely off onboard compute and learned world models.
Nvidia Alpamayo: Democratizing the Brain
Until recently, only Waymo and Tesla had the resources to build these massive world models. Enter Nvidia. In early 2026, Nvidia unveiled Alpamayo, an open-source "System 2" reasoning model for autonomous vehicles.4
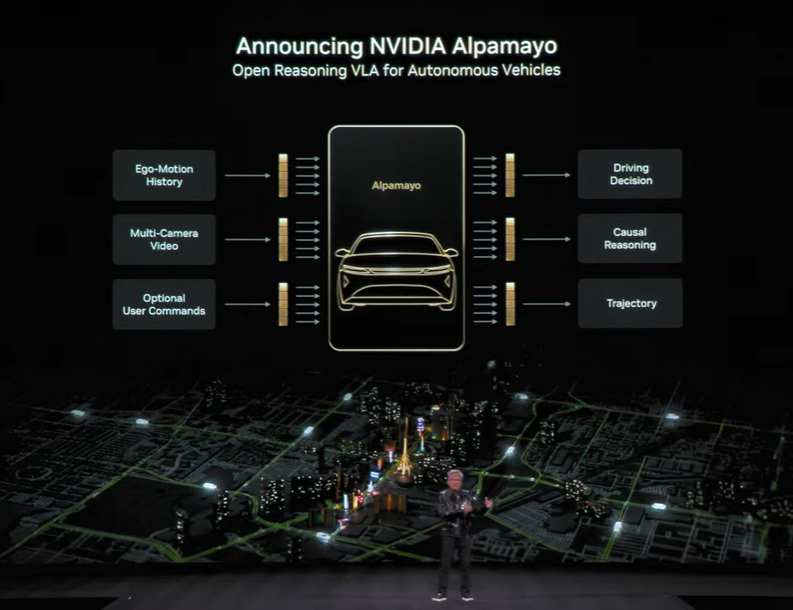
Alpamayo introduces "Chain-of-Thought" (CoT) reasoning to the broader automotive market. In traditional AI, a model sees an image and outputs "Construction Zone." Alpamayo sees the image and outputs a sequence of thoughts: "I see orange cones blocking the right lane. There is a worker holding a sign. The sign says 'Slow'. The worker is gesturing to the left. Therefore, I must merge left and reduce speed.".3
This internal monologue allows the system to handle the "Long Tail" of driving events - those rare, bizarre occurrences that happen once every million miles. By breaking the problem down into logical steps, Alpamayo reduces the chance of a catastrophic hallucination. It effectively commoditizes the "reasoning" capability that was previously the proprietary domain of the tech giants, offering a "brain in a box" to legacy automakers like Mercedes-Benz, Jaguar Land Rover, and Lucid.12
The Insight from Andrej Karpathy: The "March of Nines"
Getting a self-driving demo to work 90% of the time is easy. It takes a weekend of coding. Getting it to 99% takes a year. Getting it to 99.9% takes five years. To remove the steering wheel, you need roughly "six nines" of reliability (99.9999%), meaning the system fails only once every few million miles.
Karpathy argues that current "System 1" models (like early FSD versions) are essentially "sucking supervision through a straw".14 They rely on Reinforcement Learning (RL) where the only feedback is a disengagement. You drive for an hour (millions of frames), the human takes over once, and the model gets a single "bad" signal. It is an incredibly inefficient way to learn.
He suggests that true autonomy requires solving the "cognitive deficits" of current AI. Today's models are like "impressive autocomplete" engines—they predict the next token (or steering angle) based on statistical likelihood. But they lack a "World Model"—a true understanding of physics, causality, and object permanence. A System 1 model doesn't know why a ball rolling into the street is dangerous; it just knows that in its training data, "ball" usually equals "brake." Karpathy predicts that bridging this gap—moving from imitation to reasoning—is the central challenge of the next decade.15
Part II: Eyes on the Road – The Sensor War
The Great Schism: Vision vs. Fusion
If architecture is the brain, sensors are the eyes. And here, the divergence between Tesla and Waymo is most visible—literally. It is a debate rooted in physics, economics, and philosophy.
Table 1: Sensor Suite Comparison
|
Feature |
Tesla (Vision-Only) |
Waymo (Sensor Fusion - Gen 6) |
|---|---|---|
|
Primary Sensors |
8 External Cameras |
13 Cameras, 4 LiDAR, 6 Radar, Audio Receivers |
|
Depth Perception |
Inferred (AI estimation via Occupancy Nets) |
Direct (LiDAR Time-of-Flight) |
|
Map Reliance |
Low (Standard Nav Maps) |
High (HD Centimeter-Level Maps) |
|
Cost (Est.) |
< $500 per vehicle |
> $10,000+ (Significant reduction from Gen 5) |
|
Aesthetics |
Invisible (Integrated into body) |
Visible (Roof "Dome" + Peripherals) |
|
Theory |
"Humans drive with eyes; cars should too." |
"Superhuman safety requires superhuman senses." |
Tesla: The Camera Purist
Tesla’s philosophy, driven by Elon Musk, is rooted in first principles: The entire road system was designed for biological neural nets (brains) and optical sensors (eyes). Therefore, a sufficiently advanced silicon brain and camera system should be able to navigate it.5
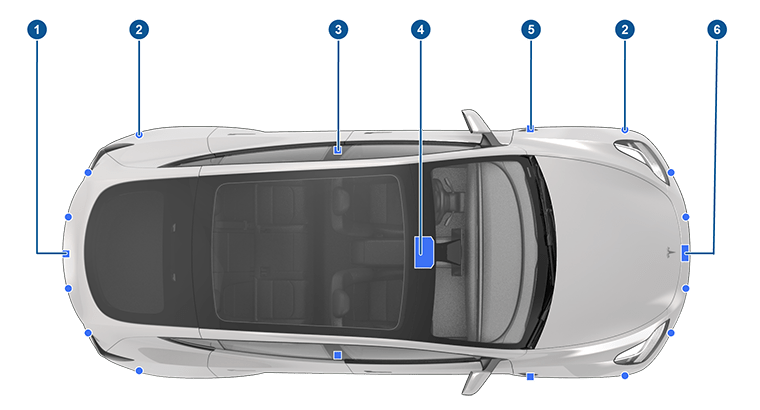
Tesla removed radar (6) and ultrasonic sensors (2) from its vehicles, relying exclusively on Tesla Vision (1,3,4,5).
- Pros: It is incredibly cheap and scalable. Every Tesla Model 3 and Y rolling off the line is a potential data collector and robotaxi. There are no fragile spinning lasers on the roof. The cost of the sensor suite is negligible compared to the battery.
- Cons: Cameras are passive sensors. They cannot "see" distance; they must estimate it, much like a human does with one eye closed (monocular depth estimation). They are also blinded by the same things that blind humans: direct sun glare, heavy rain, thick fog, and darkness.8
To compensate, Tesla uses massive "Occupancy Networks" in its software. These networks take the video feeds and construct a real-time 3D volumetric model of the world, effectively creating a "virtual LiDAR" point cloud from video.7 It is a stunning feat of software engineering, but it remains an estimation. If the AI misinterprets a white truck against a bright sky (as happened in early Autopilot crashes), it "sees" empty space. The system must "hallucinate" depth based on context, which introduces a non-zero error rate in perception that LiDAR simply does not have.
Waymo: The All-Seeing Fusion
Waymo believes that to exceed human safety, you need superhuman perception. Humans get tired, distracted, and have limited night vision. A robot should not share these weaknesses.
Waymo’s 6th Generation Driver stack is a marvel of sensor integration.17
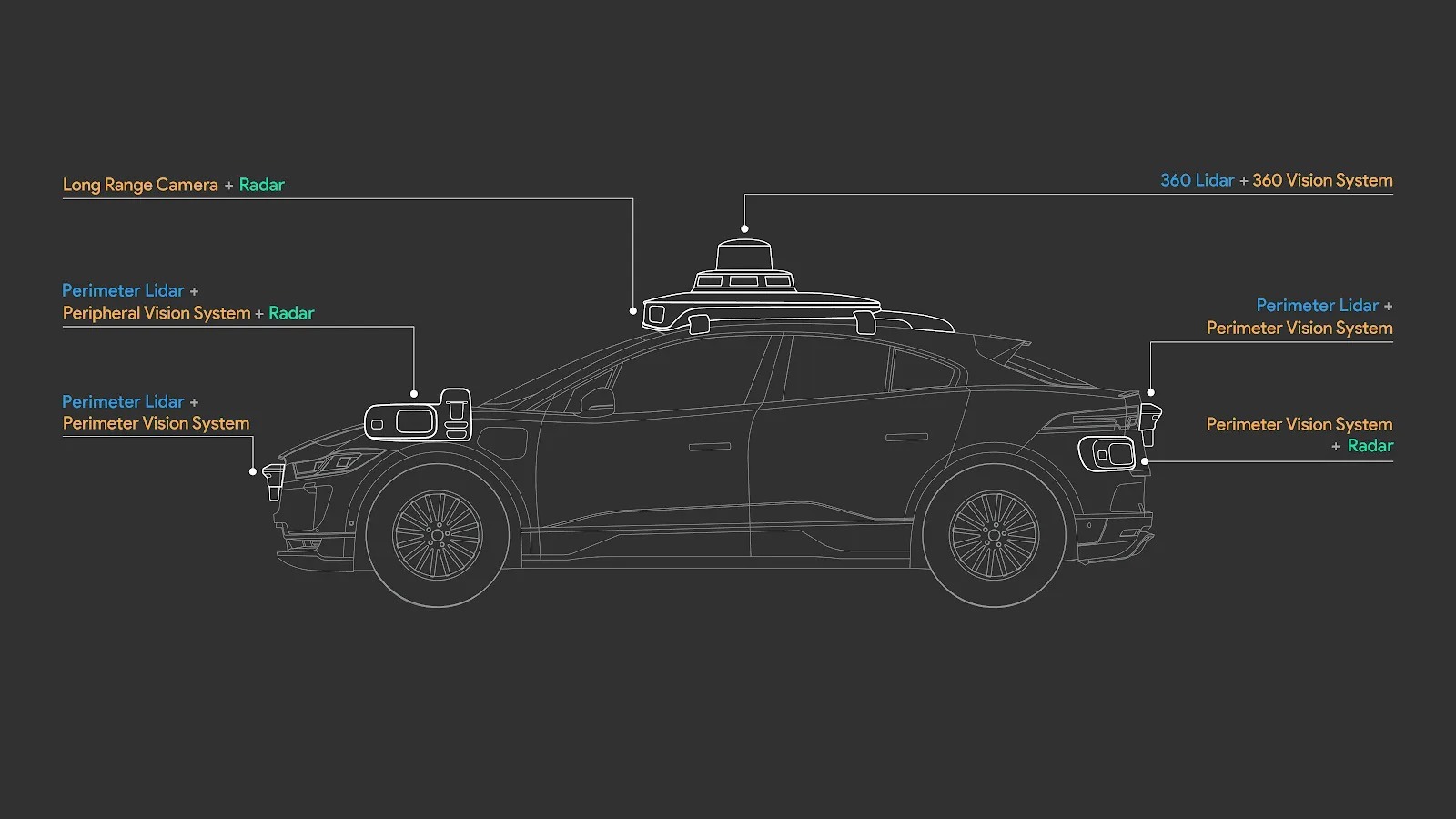
- LiDAR (Light Detection and Ranging): Paints the world in millions of laser points, providing exact distance measurements accurate to the centimeter, regardless of lighting conditions. It uses laser pulses (at 905nm or 1550nm wavelengths) to measure Time-of-Flight. It works in pitch blackness. It cuts through glare. It cannot be fooled by a photo of a tunnel painted on a wall.
- Radar: Waymo uses advanced imaging radar that sees through fog, rain, and snow. Crucially, radar measures velocity instantly using the Doppler effect. A camera needs several frames to calculate that a car ahead is braking hard; radar knows it the instant the velocity vector changes.
- Cameras: Waymo uses 13 cameras (down from 29 in Gen 5) to read traffic lights, signs, and brake lights (color and semantics).17
- Audio Receivers: A dedicated array of microphones allows the car to "hear" sirens, horns, and even the direction of approaching emergency vehicles.17
The 6th Generation suite has been optimized for cost, reducing the number of sensors while increasing range and resolution. This "sensor fusion" creates a redundant safety net. If the camera is blinded by the sun, the LiDAR still sees the car ahead. If the LiDAR is confused by heavy rain (which can scatter laser beams), the radar sees through it.19
The Physics of the Debate: Signal-to-Noise
The debate often boils down to the "Signal-to-Noise" ratio.
- LiDAR provides a high-signal, low-noise representation of geometry. It tells you exactly where the ground is and where an obstacle is. The "priors" (assumptions) needed to process it are low.
- Cameras provide massive amounts of data (color, texture, text) but are "noisy" regarding geometry. The AI has to do heavy lifting to figure out that a flat pattern on the back of a truck isn't a 3D object, or that a puddle isn't a sinkhole.
Tesla bets that compute (AI) will eventually become good enough to resolve the noise of cameras perfectly. Waymo bets that having "ground truth" data from LiDAR is a shortcut to safety that cannot be bypassed by software alone.
Part III: The Heart (Silicon) – The Compute Bottleneck
The software is only as good as the chip it runs on. The move to "System 2" reasoning and End-to-End neural nets requires massive onboard compute power. This is where the hardware strategies of Tesla and Nvidia (powering everyone else) diverge significantly.
Since there is no publicly available information about Waymo’s compute hardware, please feel free to add in the comments or ping me directly.
Tesla AI4: The Efficiency Play
Tesla designs its own silicon. The current hardware, HW4 (AI4), is a custom inference computer built on a Samsung 7nm process.20
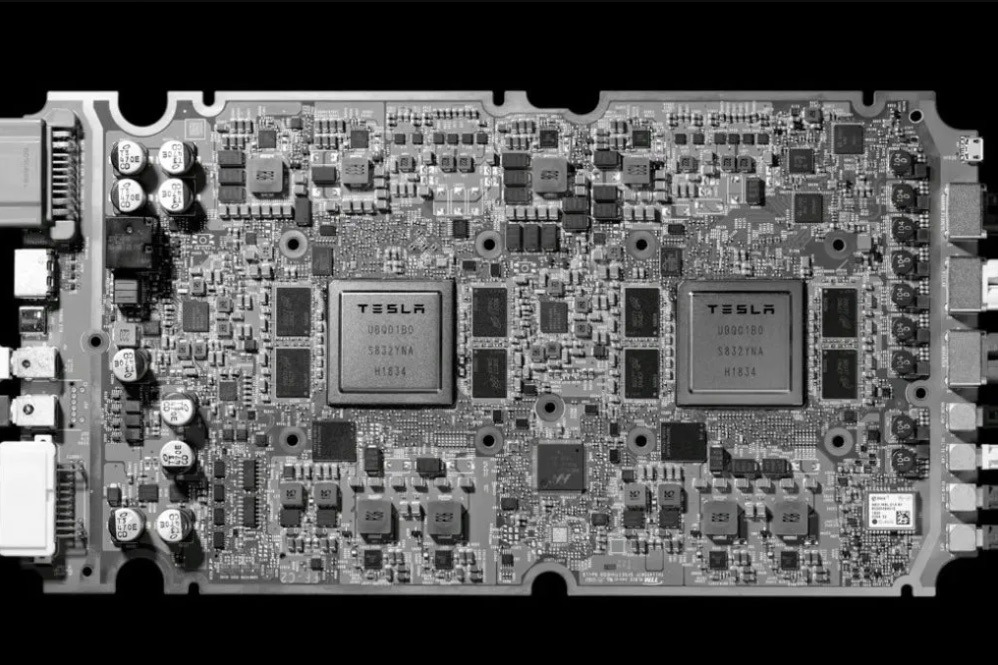
- Specs: Estimated 100-150 TOPS (Tera Operations Per Second) at INT8 precision.
- Architecture: Optimized for processing video streams from 8 cameras. It features specialized Neural Processing Units (NPUs) and a redundant dual-SoC design.
- The Bottleneck: Research suggests Tesla’s constraint isn't just raw speed, but memory bandwidth. Processing high-res video and running massive Transformers (like the V14 model) requires moving huge amounts of data in and out of the chip's memory. AI4 uses GDDR6 memory (like a gaming PC) to achieve ~384 GB/s bandwidth.20
This bandwidth limitation is critical. Large "System 2" models (VLMs) require massive memory throughput to hold their "context window" (the history of what just happened). Tesla's vision-only approach ingests massive amounts of raw video data, which saturates the memory bus. Elon Musk has stated that the next-generation chip, AI5, will have 5x the memory bandwidth and 10x the compute. However, AI5 is not due until late 2026 or 2027. This puts Tesla in a precarious position: FSD v14 is pushing the limits of current HW4 hardware. Can they fit a "reasoning" agent (System 2) onto the current cars? It is a tight squeeze, forcing them to rely on efficient "distilled" models rather than full VLMs.20
Nvidia Thor: The Sledgehammer
While Tesla builds bespoke chips, Nvidia is building the "Thor" platform for the rest of the industry.
- Specs: Up to 2,000 TFLOPS (using FP4 precision).20
- Architecture: Built on the TSMC 4N process (a custom 5nm-class node). It integrates the CPU, GPU, and control systems into one SoC (System on Chip) based on the Blackwell architecture.
- Advantage: Thor is designed explicitly for the Transformer models and Large Language Models (LLMs) that power "System 2" reasoning. It has the raw grunt to run models like Alpamayo alongside the rest of the car's software. It supports native FP4 (4-bit floating point) quantization, which allows it to run massive models with less memory impact.21
Table 2: Silicon Showdown
|
Spec |
Tesla AI4 (Current) |
Nvidia Thor (Next-Gen) |
|---|---|---|
|
Compute |
~150 TOPS (INT8) |
~2,000 TFLOPS (FP4) |
|
Process Node |
Samsung 7nm |
TSMC 4N (5nm class) |
|
Memory Type |
GDDR6 |
LPDDR5X |
|
Memory Bandwidth |
~384 GB/s |
~273 GB/s (per chip) |
|
Primary Use |
Vision Inference |
VLM/LLM Reasoning + Vision |
|
Adopters |
Tesla |
Mercedes, Zeekr, Lucid, BYD |
The Insight: Tesla’s vertical integration allowed them to lead early, but Nvidia’s massive R&D scale in the data center is trickling down to cars. Thor is a monster chip that might allow competitors to "leapfrog" Tesla’s older HW4 silicon in terms of raw reasoning capability, provided they can write the software to use it. Tesla's bet is that their highly optimized software can squeeze more performance out of weaker hardware than competitors can get out of brute force.20
Part IV: The Data Fuel – Quality vs. Quantity
AI eats data. And in the race for autonomy, the two companies are consuming very different diets.
Tesla: The Ocean of Data
Tesla has a fleet of over 5 million vehicles on the road. A significant portion of these are running FSD (Supervised) or operating in "Shadow Mode."
- Shadow Mode: Even when a human is driving, the Tesla computer is running in the background, making predictions. If the computer predicts "turn left" and the human goes straight, the system flags this divergence and uploads the data to Tesla’s servers.5
- Scale: Tesla collects billions of miles of data annually. This allows them to capture the "long tail" of weird events—mattresses on the highway, horses and buggies, blizzards in North Dakota—that a smaller fleet might never see.
- The V14 Leap: With FSD v14, Tesla has scaled its training parameters by 10x.22 They are training on massive clusters of Nvidia H200s (and soon their own Dojo supercomputer), attempting to "brute force" the solution through sheer volume of experience.
Waymo: The Curated Library
Waymo’s fleet is tiny by comparison - thousands of vehicles, not millions. They have accumulated roughly 100 million autonomous miles.10 However, Waymo argues that their data is of infinitely higher quality.
- High-Fidelity Labels: Because Waymo cars use LiDAR, their training data comes with perfect "ground truth" depth. They don't have to guess how far away a pedestrian was; they know.
- Simulation: Waymo relies heavily on simulation (Carcraft). They take real-world encounters and fuzz them into millions of variations in a virtual world, training their system on billions of simulated miles that are physically accurate.10
- Closed Loop Feedback: Waymo’s system learns from its own driving. It uses a "Critic" model to evaluate its own performance and flag suboptimal behaviors for retraining. This creates a "flywheel" where the car teaches itself.10
The Insight: Tesla is playing a game of breadth; they have seen everything but with "noisy" vision data. Waymo is playing a game of depth; they have seen less, but with "perfect" sensor precision and they simulate the rest. Tesla believes that "quantity has a quality all its own." Waymo believes that "garbage in, garbage out" applies to AI training, and that camera-only data is inherently "garbage" compared to LiDAR data.
Part V: Recent Developments & The Reality Check
The Coast-to-Coast Drive: A New Benchmark
In early 2026, the debate shifted from theoretical to practical. A Tesla owner, David Moss, documented a zero-intervention drive from Los Angeles to Myrtle Beach using FSD v14.2. The journey took 2 days and 20 hours. The car handled charging stops, highway interchanges, and city traffic without a single "disengagement" (human takeover).1

This achievement is significant for several reasons:
- Generalization: It proves the "end-to-end" model generalizes across state lines, different road markings, and varying weather conditions.
- Reliability: While one drive is statistically insignificant (a "sample size of one"), the fact that it is possible suggests the MTBF (Mean Time Between Failures) of FSD has improved by orders of magnitude since v12.
- Community Validation: The drive was tracked via the Whole Mars FSD database, adding a layer of verification often missing from manufacturer claims.24
In addition, I personally heard quite a few anecdotal success stories of Tesla FSD v14 from my own network during the 2025-2026 holiday season. My friends have completed end-to-end return trips from San Francisco to LA and the Bay Area to Lake Tahoe (ski resorts) without any human intervention. They believe it is a significant improvement from V13 and claim that V14 can drive as well as a typical human driver.
However, critics remain skeptical. They point to the "Gambler’s Fallacy." If the system has a failure rate of 1 in 10,000 miles, you can easily drive 3,000 miles without an issue. But to be a robotaxi (no driver), you need a failure rate of 1 in 10,000,000 miles. A human driver is still statistically safer than FSD v14 over the aggregate of all miles driven.25
The Waymo Reality
While Tesla celebrates a single cross-country drive, Waymo is operating a commercial service
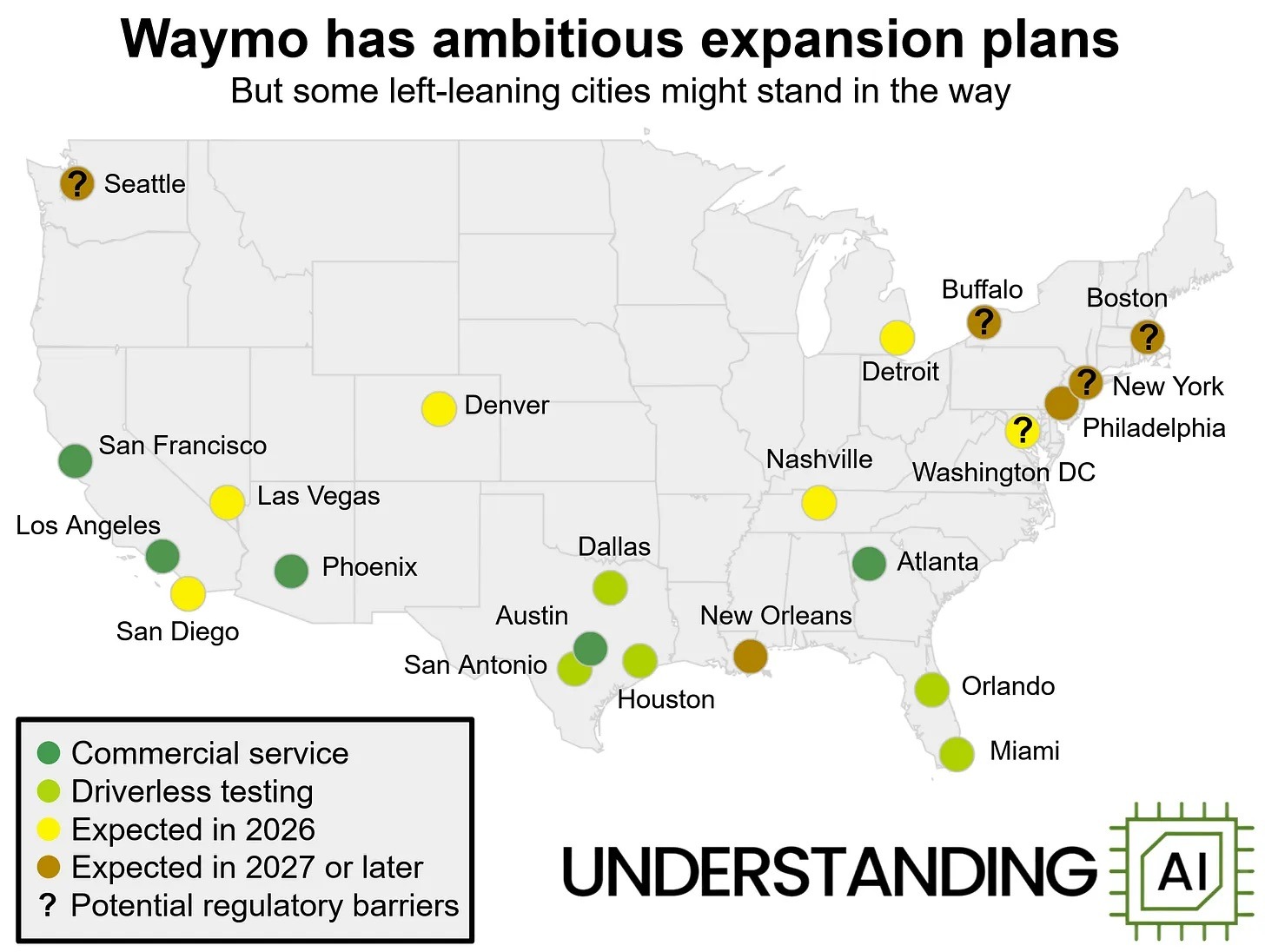
- The Stat: Waymo has a crash rate significantly lower than human drivers in the areas it operates (0.7 crashes per million miles vs 4.85 for humans).25
- The Constraint: Waymo is geofenced. It cannot just drive to Myrtle Beach tomorrow. It needs maps and validation.
Part VI: Future Predictions and The Road Ahead
Who wins the Gran Turismo? The answer depends on the timeline and the definition of victory.
1. The Short Term (2026-2028): Waymo Dominates Robotaxi, Tesla Dominates ADAS
- Waymo: Will continue to scale city by city. Their unit costs are dropping (Gen 6), and their safety case is proven. They will own the "Uber-without-a-driver" market in major dense metros. The addition of VLM (System 2) will help them handle the rare edge cases that previously stalled them.
- Tesla: FSD v14 will become an incredible "Supervised" system. It will drive you coast-to-coast, but you will still need to pay attention. The leap to "Unsupervised" (removing the steering wheel) is exponentially harder than the leap to v14. The hardware constraints of HW4 may prevent full L5 autonomy, forcing a wait for AI5.
2. The Long Term (2029+): Convergence
- The "Android" Moment: Nvidia’s Alpamayo and Thor platform will allow other automakers to catch up. We will see "commoditized autonomy" where a Mercedes or a Hyundai has "reasoning" capabilities similar to Waymo, powered by Nvidia.
- Tesla’s Data Victory: If—and it is a big if—Tesla can solve the "reasoning" problem using their massive video fleet and end-to-end training, they win the global game. They have the manufacturing capacity (millions of cars) and the cost structure (cheap sensors) to deploy autonomy everywhere, from Mumbai to Montana, places Waymo’s HD maps will never reach.
- A Waymo pivot: this is entirely speculative, but based on the vast brain power of Google AI Research and its rapid advancement in Gemini suite of multi-modal models, there is possibility that google might secretly run a parallel program with a fundamentally different system architecture.
3. The Wild Card: System 2 Distillation
The cutting edge of research (referenced in 26) involves "distilling" the heavy, slow System 2 reasoning of large models into fast, efficient System 1 networks.
- Imagine a student (System 1) learning from a professor (System 2). The professor thinks slowly and explains why. The student eventually learns to just do it instantly.
- Tesla and Waymo are both racing to do this. Waymo uses its VLM to teach its driving policy. Tesla uses its curated video clips (labeled by auto-labelers) to teach its end-to-end net.
- Prediction: The winner will be the company that best automates this "teacher-student" loop. Tesla has more "students" (cars) and data. Waymo has a better "professor" (verified, ground-truth data). So it will be a fair game for both.
Conclusion: The Infinite Mile

The journey from Los Angeles to Myrtle Beach was a triumph of engineering, a testament to how far neural networks have come. But the distance between "works 99% of the time" and "works well enough to sleep in the back seat" is not measured in miles; it is measured in nines.
Tesla is sprinting down this road with a vision of universal, affordable autonomy, fueled by the sheer scale of its fleet and the audacity of its "vision-only" bet. Waymo is building the road as it drives, laying down a foundation of sensors and maps that guarantee safety at the cost of speed and scale.
As Nvidia democratizes the "brain" of the car with tools like Alpamayo, the distinction between the two may blur. Cars will learn to reason. They will learn to explain themselves. And somewhere in the invisible handshake between a camera, a laser, and a silicon chip, the genie in the machine will finally take the wheel for good. And it is a win of grand proportion for transportation.
References
- Elon Musk responds after Tesla owner completes first ever fully autonomous drive across America - UNILAD Tech, accessed January 7, 2026,
https://www.uniladtech.com/vehicles/car-news/musk-responds-tesla-owner-first-autonomous-drive-867091-20260102 - Tesla FSD successfully completes full coast-to-coast drive with zero interventions - Teslarati, accessed January 7, 2026,
https://www.teslarati.com/tesla-fsd-successfully-completes-full-coast-to-coast-drive-with-zero-interventions/ - Self Driving Has Been Solved by NVIDIA?, accessed January 7, 2026,
https://www.youtube.com/shorts/gVbpwlNdUTg - Building Autonomous Vehicles That Reason with NVIDIA Alpamayo ..., accessed January 7, 2026,
https://developer.nvidia.com/blog/building-autonomous-vehicles-that-reason-with-nvidia-alpamayo/ - Deep Dive: Tesla, Waymo, and the Great Sensor Debate | Contrary Research, accessed January 7, 2026,
https://research.contrary.com/report/tesla-waymo-and-the-great-sensor-debate - The curious long tail of automated driving: It reads minds but stops too far from the ticket machine - ResearchGate, accessed January 7, 2026,
https://www.researchgate.net/publication/387997832_The_curious_long_tail_of_automated_driving_It_reads_minds_but_stops_too_far_from_the_ticket_machine - Tesla's FSD Redefines Autonomous Driving - Veltyx, accessed January 7, 2026,
https://www.veltyx.de/en/post/tesla-s-fsd-redefines-autonomous-driving - What's the difference in approach between Tesla FSD and Waymo and which is better?, accessed January 7, 2026,
https://www.reddit.com/r/SelfDrivingCars/comments/1mmxu53/whats_the_difference_in_approach_between_tesla/ - Kyle talks pros and cons of Waymo and Tesla approaches : r/SelfDrivingCars - Reddit, accessed January 7, 2026,
https://www.reddit.com/r/SelfDrivingCars/comments/1lkcco0/kyle_talks_pros_and_cons_of_waymo_and_tesla/ - Demonstrably Safe AI For Autonomous Driving - Waymo, accessed January 7, 2026,
https://waymo.com/blog/2025/12/demonstrably-safe-ai-for-autonomous-driving - Waymo: "Verifiable and safe" autonomous driving AI - EEWorld, accessed January 7, 2026,
https://en.eeworld.com.cn/news/qcdz/eic715466.html - NVIDIA Announces Alpamayo Family of Open-Source AI Models and Tools to Accelerate Safe, Reasoning-Based Autonomous Vehicle Development, accessed January 7, 2026,
https://nvidianews.nvidia.com/news/alpamayo-autonomous-vehicle-development - Andrej Karpathy told Dwarkesh that AGI is still a decade away. - The Neuron, accessed January 7, 2026,
https://www.theneuron.ai/explainer-articles/andrej-karpathy-told-dwarkesh-that-agi-is-still-a-decade-away - Beyond the Hype: 5 Counter-Intuitive Truths About AI from Andrej Karpathy, accessed January 7, 2026,
https://dev.to/amananandrai/beyond-the-hype-5-counter-intuitive-truths-about-ai-from-andrej-karpathy-afk - Andrej Karpathy — AGI is still a decade away - Dwarkesh Podcast, accessed January 7, 2026,
https://www.dwarkesh.com/p/andrej-karpathy - Issues Under The Surface With Tesla FSD vs. Waymo Driver - CleanTechnica, accessed January 7, 2026,
https://cleantechnica.com/2025/12/16/issues-under-the-surface-with-tesla-fsd-vs-waymo-driver/ - New Waymo robotaxi offers better performance at lower cost - The Robot Report, accessed January 7, 2026,
https://www.therobotreport.com/new-waymo-robotaxis-offers-better-performance-at-lower-cost/ - Meet the 6th-generation Waymo Driver : r/singularity - Reddit, accessed January 7, 2026,
https://www.reddit.com/r/singularity/comments/1ewdrd1/meet_the_6thgeneration_waymo_driver/ - Tesla's Robotaxi Bet: Vision-Only vs. Multi-Sensor Reality Check - EYE2DRIVE, accessed January 7, 2026,
https://www.eye2drive.com/2025/06/19/tesla-testing-vision-only-autonomy-in-robotaxi-fleet/ - Tesla AI4 vs. NVIDIA Thor: the brutal reality of self-driving computers | Electrek, accessed January 7, 2026,
https://electrek.co/2025/11/25/tesla-ai4-vs-nvidia-thor-reality-self-driving-computers/ - Introducing NVIDIA Jetson Thor, the Ultimate Platform for Physical AI, accessed January 7, 2026,
https://developer.nvidia.com/blog/introducing-nvidia-jetson-thor-the-ultimate-platform-for-physical-ai/ - China's Intelligent Driving Industry: Dramatic Changes in Computing Power - 36氪, accessed January 7, 2026,
https://eu.36kr.com/en/p/3617790434980357 - Tesla vs. Waymo vs. Cruise: Who's Leading the Autonomous Vehicle Race? (Market Share Stats) | PatentPC, accessed January 7, 2026,
https://patentpc.com/blog/tesla-vs-waymo-vs-cruise-whos-leading-the-autonomous-vehicle-race-market-share-stats - Tesla FSD Achieves First Fully Autonomous U.S. Coast-to-Coast Drive : r/singularity - Reddit, accessed January 7, 2026,
https://www.reddit.com/r/singularity/comments/1q0pvbr/tesla_fsd_achieves_first_fully_autonomous_us/ - Elon on Waymo: "Never really had a chance against Tesla" Waymo Details AI Safety Strategy : r/SelfDrivingCars - Reddit, accessed January 7, 2026,
https://www.reddit.com/r/SelfDrivingCars/comments/1pj4ufx/elon_on_waymo_never_really_had_a_chance_against/ - Distilling Multi-modal Large Language Models for Autonomous Driving - arXiv, accessed January 7, 2026,
https://arxiv.org/html/2501.09757v1 - Distilling System 2 into System 1 - arXiv, accessed January 7, 2026,
https://arxiv.org/html/2407.06023v1 - Ashok Elluswamy “Foundation model for FSD”, ICCV 2025 presentation
https://www.youtube.com/watch?v=IkW8hIGimfs
[story continues]
tags