Table of Links
2. Mathematical Description and 2.1. Numerical Algorithms for Nonlinear Equations
2.4. Matrix Coloring & Sparse Automatic Differentiation
3.1. Composable Building Blocks
3.2. Smart PolyAlgortihm Defaults
3.3. Non-Allocating Static Algorithms inside GPU Kernels
3.4. Automatic Sparsity Exploitation
3.5. Generalized Jacobian-Free Nonlinear Solvers using Krylov Methods
4. Results and 4.1. Robustness on 23 Test Problems
4.2. Initializing the Doyle-Fuller-Newman (DFN) Battery Model
4.3. Large Ill-Conditioned Nonlinear Brusselator System
2.4. Matrix Coloring & Sparse Automatic Differentiation
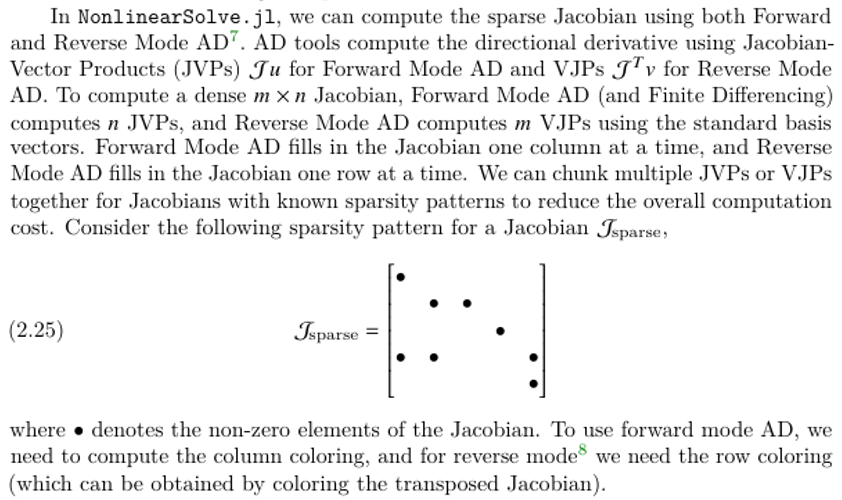
The Jacobian computation and linear solver are typical bottlenecks for numerical nonlinear equation solvers. If the sparsity pattern of a Jacobian is known, then computing the Jacobian can be done with much higher efficiency [42]. Sparsity patterns for arbitrary programs can be automatically generated using numerical techniques [43, 44] or symbolic methods [45]. Given the sparsity pattern, we can use graph coloring algorithms [46, 47] to compute the matrix colors for the given sparse matrix.
This paper is available on arxiv under CC BY 4.0 DEED license.
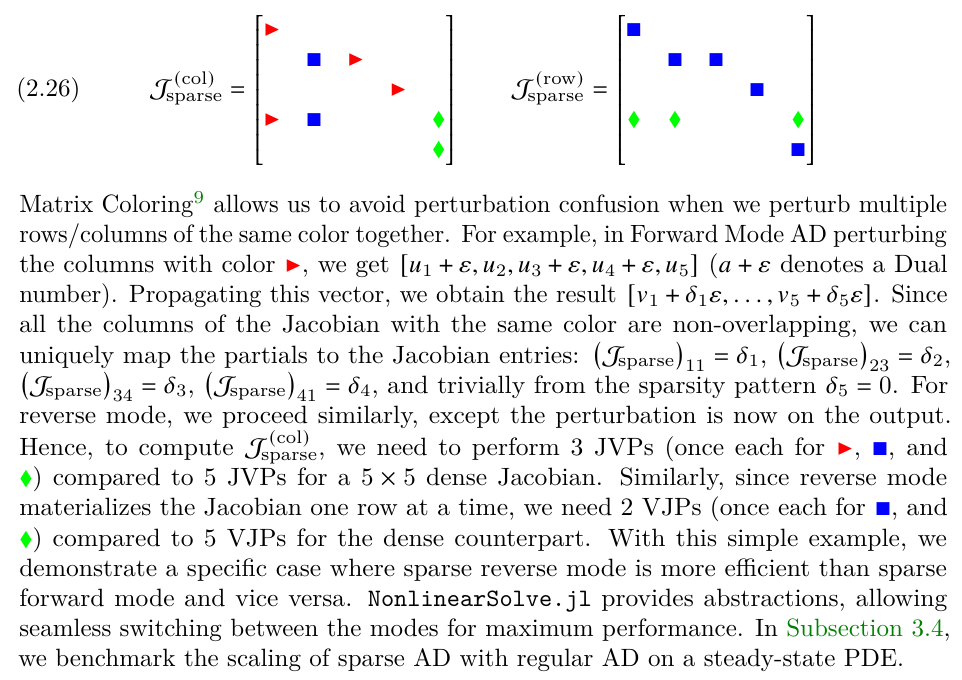
[7] Sparse symbolic AD is the most optimal way to compute sparse Jacobians in certain situations. We currently lack the capability for built-in symbolic sparse Jacobians.
[8] For wider availability of the sparse Reverse Mode functionality, we make it available via SparseDiffTools.jl instead of NonlinearSolve.jl.
Authors:
(1) AVIK PAL, CSAIL MIT, Cambridge, MA;
(2) FLEMMING HOLTORF;
(3) AXEL LARSSON;
(4) TORKEL LOMAN;
(5) UTKARSH;
(6) FRANK SCHÄFER;
(7) QINGYU QU;
(8) ALAN EDELMAN;
(9) CHRIS RACKAUCKAS, CSAIL MIT, Cambridge, MA.
[story continues]
tags