TL;DR —
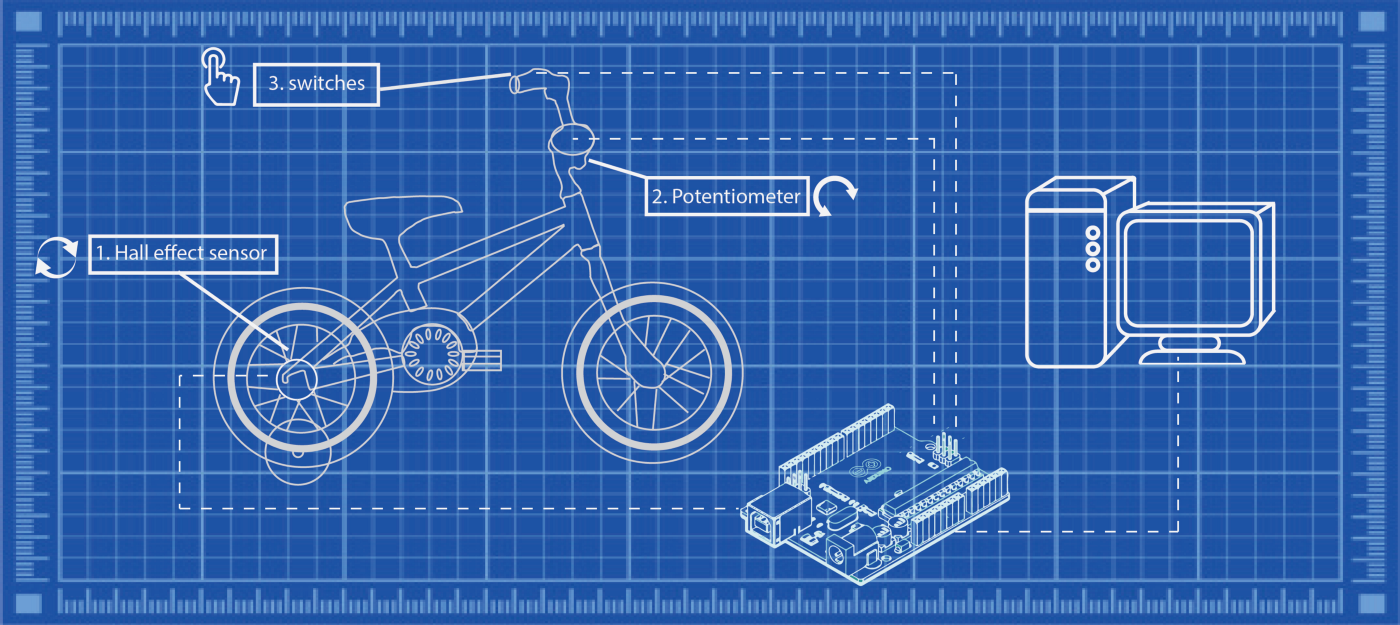
Michael Chein walks you through the process of turning any bicycle into an arcade-like controller for computer games. The first step is turning the bicycle into indoor training bikes by getting the rear wheel to spin freely without touching the ground, and allow the handlebars to turn freely as well. Data from all sensors will be captured and transformed by an Arduino that will function as a keyboard and send keystrokes to a computer running a (most likely racing) game. You should NOT proceed to the following steps as it is your responsibility to make sure that the bicycle are secure and safe to use.
[story continues]
Written by
@Michael_Chein
Holds a PhD in neuroscience from Tel Aviv University. Currently working as a data scientist at IBM.
Topics and
tags
tags
arduino|kids|hackernoon-top-story|keyboard|bike-into-keyboard|bicycle-into-keyboard|parenting|gaming|web-monetization
This story on HackerNoon has a decentralized backup on Sia.
Transaction ID: DhfKPGbYmpBLkTPBwjuSGhx_G4KQwcvwhGol-5UawOs