As we continue experimenting with various autonomous navigation technologies for drones—especially in conditions where GPS fails—we're constantly facing a hard truth: existing solutions just don't work as seamlessly as they should. Why? Because each individual approach has its own inherent limitations.
Let’s break it down.
The Drift Problem with Inertial Navigation System
At first glance, Inertial Navigation Systems (INS) seem like an ideal solution for UAV autonomy in GPS-denied environments. After all, INS doesn't rely on GPS—it uses accelerometers and gyroscopes to measure changes in velocity and orientation. Sounds promising, right? The problem is that drift—the gradual accumulation of errors over time—becomes a major issue after just a few kilometers of flight.
This is especially problematic in environments with no external reference points for recalibration (like GPS or visual landmarks). Our feedback from the frontlines reveals that relying solely on INS in environments like forests or flat terrain leads to a significant drop in accuracy, and that’s a serious problem when precision is critical in military operations.
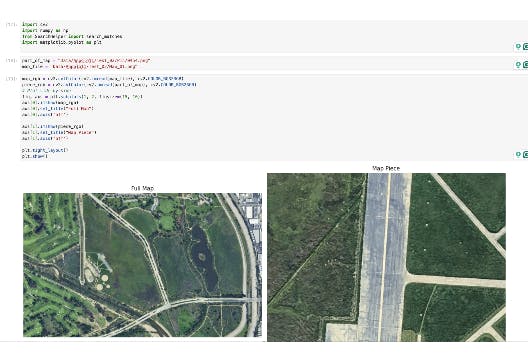
SLAM: Works in Theory, Fails in Practice
Another promising technology is Simultaneous Localization and Mapping (SLAM). This system uses cameras or LIDAR to create a map of the surroundings while simultaneously determining the UAV’s location within it. Theoretically, SLAM could be the perfect solution for autonomous navigation in unfamiliar terrain.
However, the reality on the ground is different. In urban environments where there are plenty of visual cues—buildings, roads, etc.—SLAM works reasonably well. But once you move to featureless terrains (like plains or forests), the system struggles to create an accurate map or maintain localization. Without clear landmarks, SLAM accumulates errors, which makes it unreliable for precision tasks—such as reconnaissance or strike coordination—that require pinpoint accuracy.
Optical Flow: A Helpful Add-On, But Not a Standalone Solution
Optical flow is another interesting technology. It calculates the movement of objects within the camera’s field of view to estimate the UAV’s velocity. While it can provide valuable data for short-term motion estimation, it doesn't work well as the sole navigation solution—especially in rapidly changing or dynamic environments. In military scenarios, where terrain and conditions shift quickly, optical flow can fail to provide reliable guidance on its own.
However, when integrated into a hybrid system, optical flow adds important motion cues that help the UAV correct its position in real time, especially during high-speed maneuvers or in environments where visual data changes rapidly.
The Power of Hybrid Integration
So, where do we go from here? After thoroughly analyzing these systems, we’ve come to a critical conclusion: it’s not about relying on one solution—it’s about integrating them. The future of autonomous navigation for UAVs lies in a hybrid system that combines visual navigation, inertial systems, and optical flow. This is the approach we’ve implemented with our system, where all three technologies work together, not in isolation, from the very start.
By integrating visual navigation with INS and optical flow, we’ve created a system that delivers reliable and precise navigation even in GPS-denied environments. The key is real-time feedback—the systems constantly correct each other, minimizing errors and ensuring that the UAV remains stable and accurate throughout the flight.
Frontline Feedback: Real-World Testing
The results speak for themselves. Our hybrid system has already been tested in real-world combat conditions, where GPS signals are often unavailable due to jamming or natural obstructions. Despite these challenges, the system has consistently delivered accurate positioning and precise targeting, even when flying in GPS-denied zones. It’s become evident that this hybrid approach is far superior to the traditional methods that rely on single technologies.
The feedback from military operations is encouraging, with hybrid navigation systems showing significantly better performance in critical missions like reconnaissance, intelligence gathering, and precision strikes. Moreover, the system has demonstrated its capability in long-range missions and dense environments, where other systems would have faltered.
A Solution for More Than Just the Battlefield
It’s not just military applications where hybrid navigation shines. We're also receiving interest from commercial sectors, including logistics, autonomous delivery, and environmental monitoring in remote or difficult-to-access areas. In these fields, the need for autonomy in GPS-denied environments is growing, and our system offers a reliable and cost-effective solution.
The Future: Autonomous UAVs on the Battlefield
The trend is clear—autonomous drones are transforming modern warfare. As UAVs become increasingly essential for surveillance, targeting, and delivery, the ability to operate without GPS is no longer a luxury; it’s a necessity. Autonomous navigation systems are already being used in real-world military operations, and as the demand for autonomous capabilities grows, these systems will play an even more significant role on the battlefield.
The shift to robotic warfare is inevitable. In the future, drones and autonomous systems will be the ones to face the dangers of war—not humans. And that’s a positive step forward. While humanity may never stop wars, we can at least stop sacrificing human lives by putting robots on the front lines. This shift is happening now, and it’s something every manufacturer and developer in the defense space should be preparing for.
The technology behind Codective One is just the beginning. As we continue to refine and expand our hybrid navigation solutions, we’re committed to helping the defense industry and commercial sectors move toward a future where autonomy and reliability are the standard, not the exception.
Anton Gera is the CEO of Codective, a company focused on developing autonomous navigation solutions for unmanned systems. Codective One integrates visual navigation, inertial systems, and optical flow to enable UAVs to navigate with precision in GPS-denied environments.