Table of Links
-
Contextuality for general probabilistic theories
3.2 Operational theory associated to a GPT system
-
Hierarchy of contextuality and 4.1 Motivation and the resource theory
4.2 Contextuality of composite systems
-
Discussion
A Physicality of the Holevo projection
3 Contextuality for general probabilistic theories
One can often prove contextuality of a theory by studying statistical behaviours of an individual system A (such as a qubit) in prepare-and-measure scenarios. The information that suffices to describe the possible behaviours constitutes of
• a set Ω of possible states that A can be prepared in, according to the theory in question,
• a set of possible measurements that can be applied to A, each consisting of a collection of effects associated with the measurement outcomes, and
• for every state ω ∈ Ω and every effect e the probability of obtaining e when measurement M is applied to system A prepared in state ω.
This information is commonly expressed as a system in a general probabilistic theory— a GPT system.
In the following we omit any mention of dynamics that the system may undergo. This simplification has no consequence on our discussion of preparation and measurement contextuality.
3.1 GPT systems
Let us now discuss the mathematical description of GPT systems [54–57] and the definition of contextuality in this context.
Definition 1. A GPT system A is specified by two non-empty convex sets
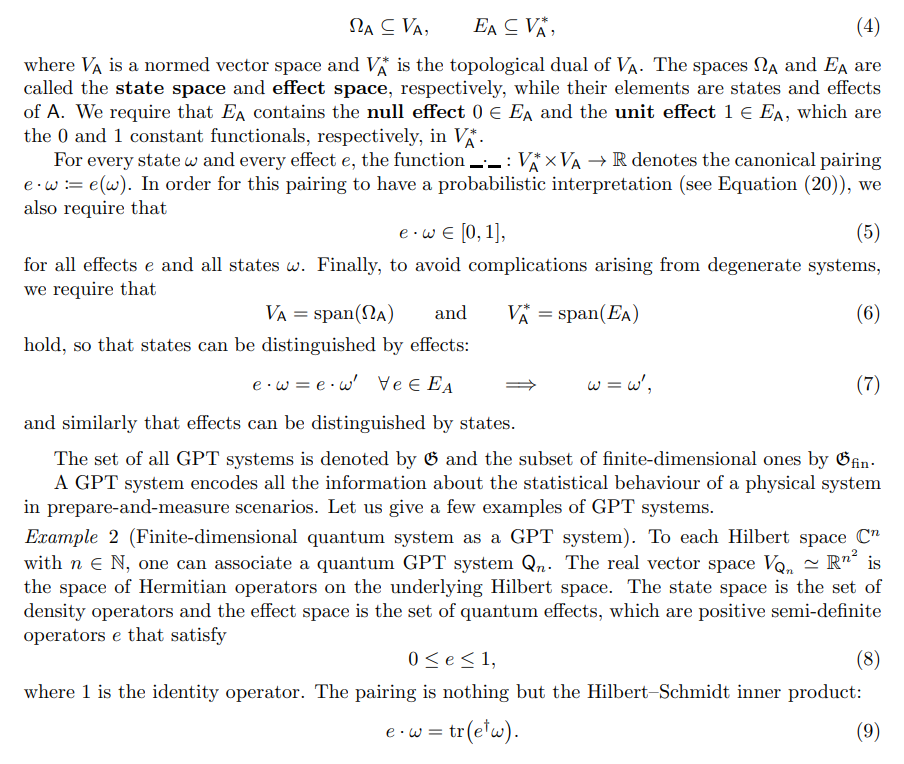
Likewise, every classical probabilistic system is a GPT system [54, §4].
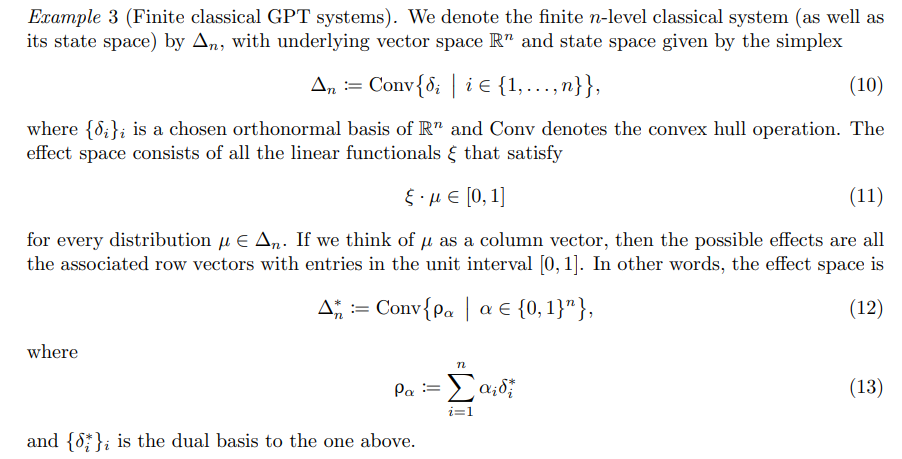
Besides finite classical systems, we will also need the notion of a countably infinite one.

Besides individual systems, we will occasionally also need to refer to composite ones. In general, the composite of two GPT systems is not unique – see [58, Section 5] for an in-depth discussion of tensor products of GPT systems. However, among all the possible choices, there is a ‘minimal composite’ of two GPT systems A and B, whose state and effect space merely contain the separable ones. Any meaningful composite of two GPT systems necessarily contains their minimal composite as a subsystem.
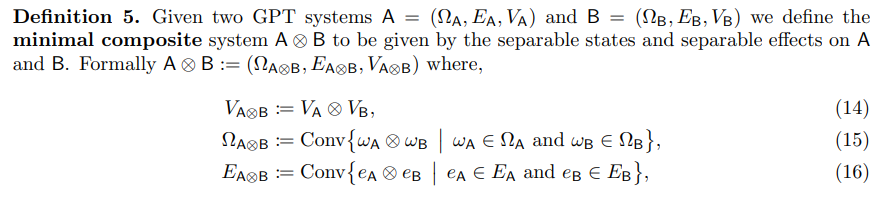
Of particular interest is the tensor product of an arbitrary GPT system and a classical GPT system, in which case there is a unique choice of a sensible tensor product corresponding to the minimal composite of GPT systems.
Authors:
(1) Lorenzo Catani, International Iberian Nanotechnology Laboratory, Av. Mestre Jose Veiga s/n, 4715-330 Braga, Portugal (lorenzo.catani4@gmail.com);
(2) Thomas D. Galley, Institute for Quantum Optics and Quantum Information, Austrian Academy of Sciences, Boltzmanngasse 3, A-1090 Vienna, Austria and Vienna Center for Quantum Science and Technology (VCQ), Faculty of Physics, University of Vienna, Vienna, Austria (thomas.galley@oeaw.ac.at);
(3) Tomas Gonda, Institute for Theoretical Physics, University of Innsbruck, Austria (tomas.gonda@uibk.ac.at).
This paper is
[story continues]
tags